Aufgabenstellung:
Für einen Helikopter soll eine Positionsregelung entworfen werden (mit Position
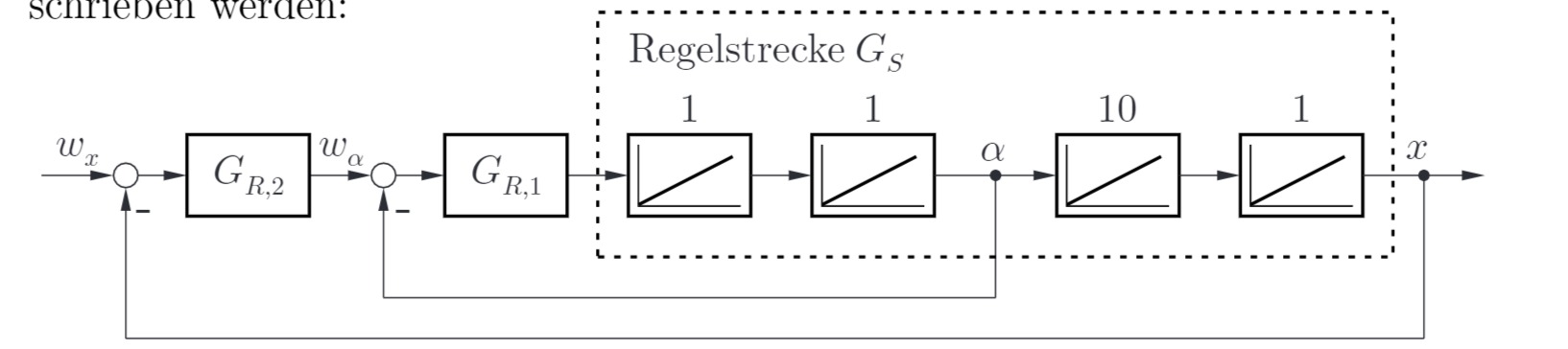
Das Regelsystem mit Führungsgröße
Hinweis: Alle Aufgabenteile sind unabhängig voneinander lösbar.
a) Begründen Sie, warum eine Positionsregelung mit einem einzelnen PIDRegler ohne unterlagerte Nickregelung den geschlossenen Regelkreis nicht stabilisieren kann.
Zunächst soll ein
b) Bestimmen Sie die Reglerparameter
Für den äußeren Regelkreis wurde ein weiterer
c) Bestimmen Sie die Routhschen Probefunktionen
d) Der statische Endwert von
Lösungsweg:
a) Begründung: nicht stabilisierbar
Aufstellen der Übertragungsfunktion des geschlossenen Regelkreises mit
Die Koeffizienten für
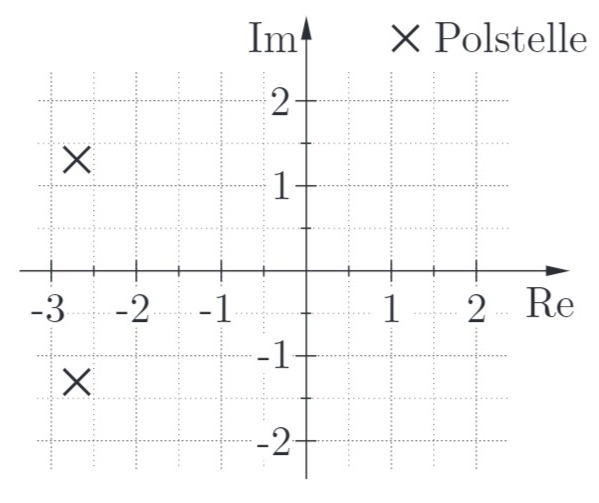
b) Reglerparameter
Aus dem Pol-Nullstellen Diagramm lassen sich die Dämpfung
Daraus ergibt sich das gewünschte Nennerpolynom:
Aufstellen der Übertragungsfunktion des geschlossenen inneren Regelkreises mit
Ein Koeffizientenvergleich mit dem Nennerpolynom ergibt:
c) Routhschen Probefunktionen und Stabilität
Untersucht wird das Nennerpolynom. Aufstellen des Routh-Schemas:
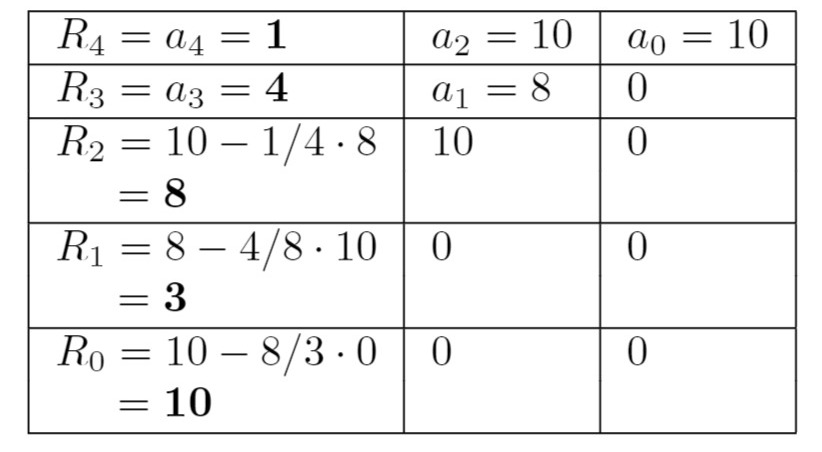
Bedingungen für Stabilität des geschlossenen Regelkreises:
- Alle Koeffizienten vorhanden und positiv
Bedingung erfüllt - Alle Routhschen Probefunktionen gröfer als null
Bedingung erfüllt ist stabil.
d) Begründung: Warum keine bleibende Regelabweichung?
Der aufgeschnittene Positionsregelkreis hat bereits ohne I-Anteil im Regler integrierendes Verhalten. Damit gibt es im Führungsübertragungsverhalten keine bleibende Regelabweichung.
Lösung:
-
Die 1 . Bedingung des Hurwitz-Kriteriums ist nicht erfüllt [\rightarrow\] instabil
-
; ist stabil - Aufgrund des integrierenden Verhaltens.