Aufgabenstellung:
Gegeben ist die folgende Regelstrecke
mit
- Kompensieren Sie das konjugiert komplexe Polpaar mit einem realisierbaren PID-Regler mit der parasitären Zeitkonstante
und geben Sie die Übertragungsfunktion des resultierenden offenen Regelkreises an. - Berechnen Sie den stationären Endwert der Sprungantwort des geregelten Systems
mit Einheitsrückführung. Beschreiben Sie, wie sich das Systemverhalten durch die Polstellen-Kompensation verändert. Was würde sich ändern, wenn anstatt des PID- und ein P-Regler verwendet werden würde.
Lösungsweg:
a) Übertragungsfunktion
Um die Polstellen zu kompensieren. wird zunächst die Übertragungsfunktion des Reglers umgestellt
wobei
Für die beiden Nullstellen der Reglerübertragungsfunktion
Um die beiden Polstellen zu kompensieren, müssen die Nullstellen
also ein komplexes Nullstellenpaar darstellen.
Damit ergibt sich für
und damit die Übertragungsfunktion des Reglers zu
Aus den Ausdrücken für
Damit durch den Regler das komplexe Polpaar kompensiert wird, muss
Damit ergibt sich für
b) stationärer Endwert der Sprungantwort
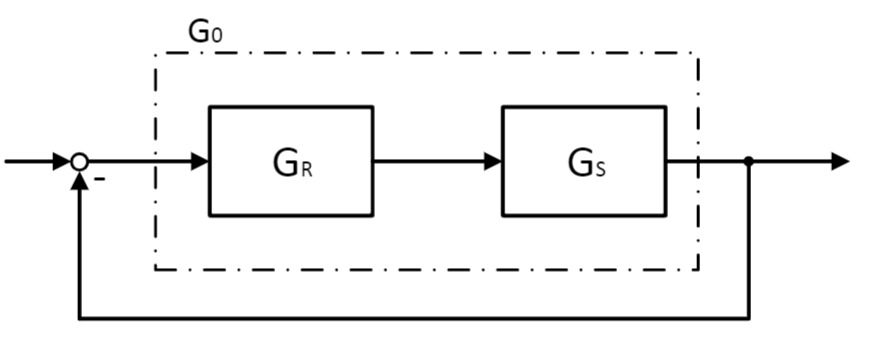
Der offene Regelkreis bestehend aus Regler und Strecke wird mit einer Einheitsrückführung negativ geschlossen (Rückkopplung), wie es in der folgenden Abbildung dargestellt ist.
Die Übertragungsfunktion des geschlossenen Regelkreises lautet deswegen
Für den Nenner der Übertragungsfunktion ergibt sich
und damit die gesamte Übertragungsfunktion zu
Das
Zunächst wird der stationäre Endwert der Sprungantwort betrachtet
Der Regelkreis ist stationär genau, da der Eingang und Ausgang im eingeschwungenen Zustand identisch sind.
Zum Vergleich der stat. Endwert der Strecke ohne die Regelung
Verhalten der Pokompensation und Regleränderung (Beschreibung)
Ungeregelt besitzt das System also keine stationäre Genauigkeit, da der Ausgang stationär nicht dem Eingang entspricht. Neben der durch den Regler erreichten stationären Genauigkeit zeigt sich zusätzlich noch sehr deutlich der Effekt der Polkompensation. Da genau die beiden komplexen Pole kompensiert wurden, welche für das Schwingungsverhalten des ungeregelten Systems verantwortlich waren, zeigt das System nach der Kompensation durch die Regelung nun aperiodisches Verhalten.