Aufgabenstellung:
Betrachtet wird ein inverses Pendel mit geschwindigkeitsabhängiger Lagerreibung gemäß folgender Abbildung:
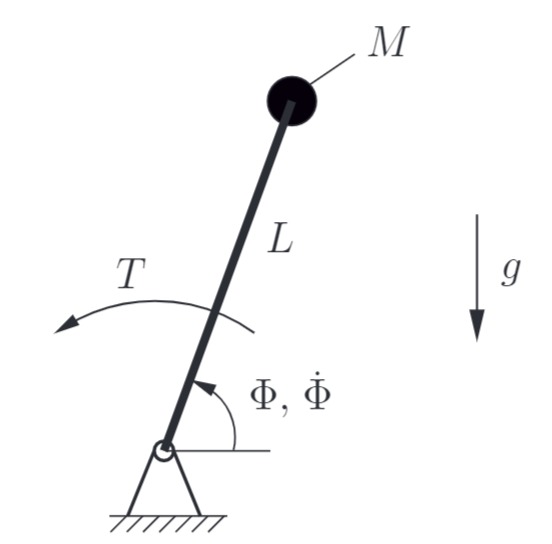
Das System kann durch folgende nichtlineare Differentialgleichung im Bereich
Der Winkel
Hinweis: Die Aufgabenteile a), b) und c)-d) können unabhängig voneinander gelöst werden.
a) Geben Sie eine linearisierte Zustandsraumdarstellung der Regelstrecke in der Form
mit
Für eine bestimmte Parametrierung ergeben sich die folgenden Zustandsraummatrizen, die im Folgenden verwendet werden sollen:
b) Ist dieses System steuerbar?
Es soll ein Zustandsregler mit der Rückführung
c) Geben Sie die neue Systemmatrix
d) Bestimmen Sie die Stabilitätsbedingungen für
Lösungsweg:
a) linearisierte Zustandsraumdarstellung
Umstellen der Gleichung nach
Einsetzen des gegebenen Arbeitspunktes
Mit
b) Steuerbarkeit
Steuerbarkeitsmatrix aufstellen:
c) Systemmatrix
Einsetzen von
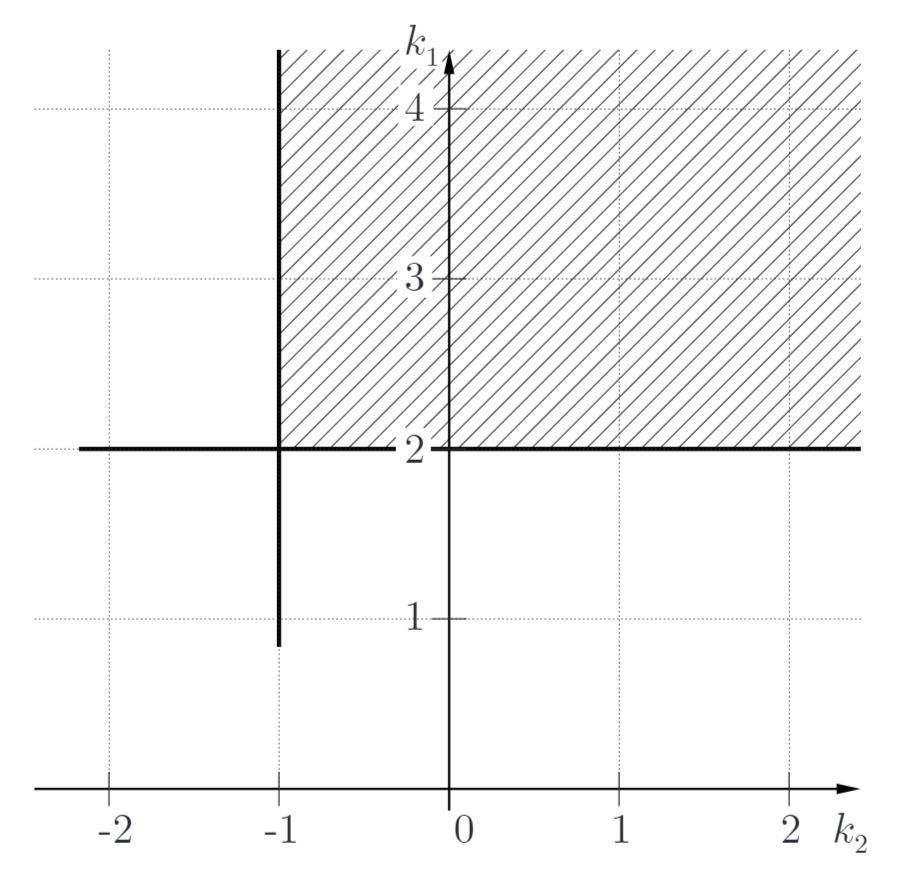
d) Stabilitätsbedingungen für
Notwendige und hinreichende Bedingung für die Stabilität des geschlossenen Regelkreises: Alle Eigenwerte von
Charakteristisches Polynom:
Damit alle Eigenwerte negativen Realteil haben, müssen alle Koeffizienten vorhanden und positiv sein. Daraus ergeben sich 2 Bedingungen an
Lösung:
-
- steuerbar
-
-
;