Aufgabenstellung:
Betrachtet wird ein Pendel mit der Masse
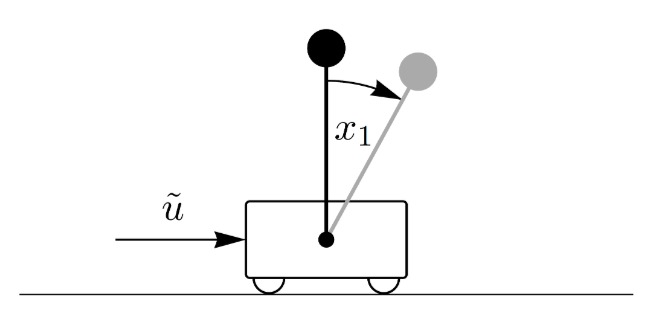
Die Dynamik des Pendels ist durch folgendes Differentialgleichungssystem gegeben
mit der Konstante
- Linearisieren Sie das Differentialgleichungssystem in der Ruhelage
und erstellen daraus ein Zustandssystem der Form
mitund Der Winkel stellt die Ausgangsgröße dar. - Zeige Sie, dass
steuerbar ist und bestimmen eine Zustandsrückführung , sodass einen doppelten Eigenwert bei hat. - Zeige Sie, dass
beobachtbar ist und bestimmen ein so, dass einen doppelten Eigenwert bei hat.
Lösungsweg:
a) Linearisierung
Die Linearisierung in
b) Steuerbarkeit und Zustandsrückführung
Es gilt
d.h.
Mit der Ackermannschen Formel ist
c) Beobachtbarkeit
Daher rechnen wir
und schließen auf die Beobachtbarkeit von
Mit der Ackermannschen Formel ist
Daus folgt für
Lösung:
- steuerbar,
- beobachtbar,