Aufgabenstellung:
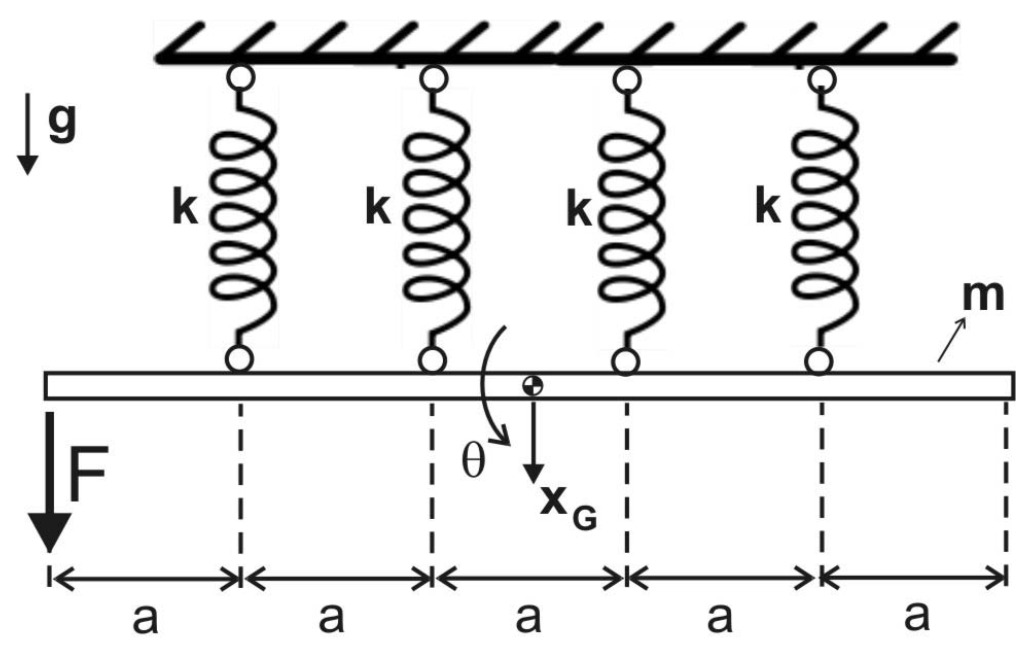 Ein Maschinenteil (starrer Balken) der Masse
Ein Maschinenteil (starrer Balken) der Masse
Vier identische lineare Federn der Steifigkeit
- Stellen Sie die Bewegungsgleichungen bezüglich der dargestellten
generalisierten Koordinatenund auf. - Berechnen Sie die Eigenfrequenzen und Eigenformen des Systems.
Gegeben:
Lösungsweg:
a) Bewegungsgleichungen
Kinematik des Systems:
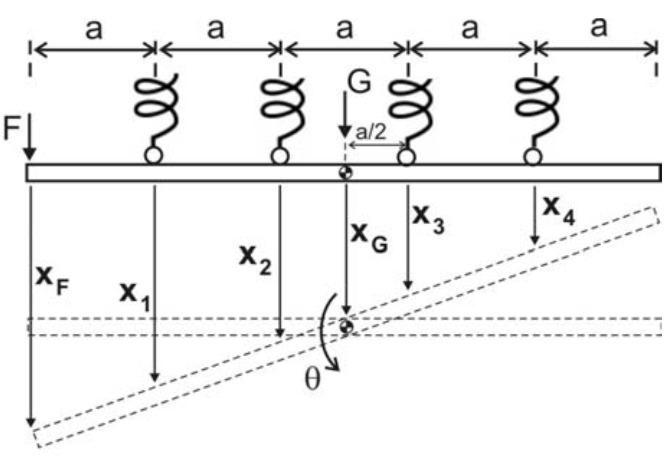
Trägheitsmoment des Balkens:
Das Freikörperbild des Balkens mit den virtuellen Verrückungen sieht so aus:
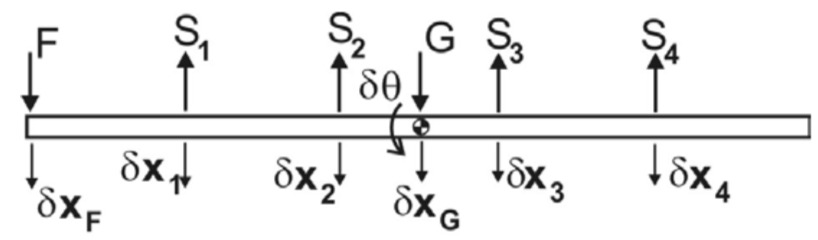
Arbeitsansatz für die virtuelle Arbeit lautet:
Damit diese Gleichungen stimmen müssen die Koeffizienten von
Damit haben wir zwei Bewegungsgleichungen:
b) Eigenfrequenzen und Eigenformen
Die Bewegungsgleichungen kann man in der Matrizenform so darstellen:
Beziehungsweise
Die Eigenvektoren und die Eigenfrequenzen folgen aus
Wobei
Damit sind die Eigenfrequenzen:
Die Eigenwerte wieder einsetzen und die Eigenvektoren berechnen: