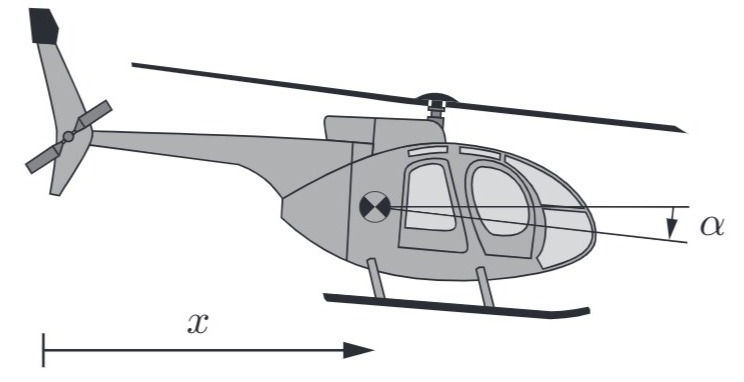
Für einen Helikopter soll eine Positionsregelung entworfen werden (mit Position und Neigungswinkel ) :
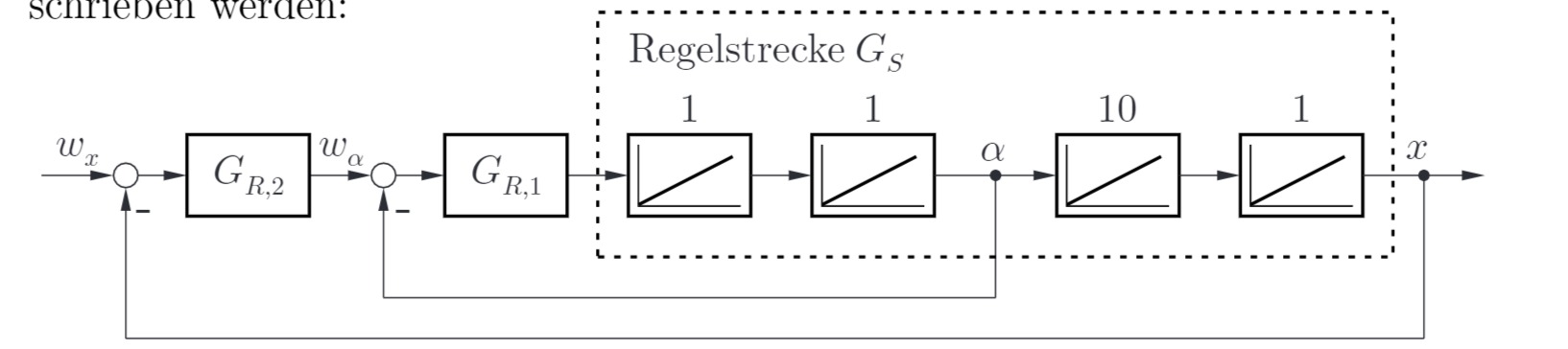
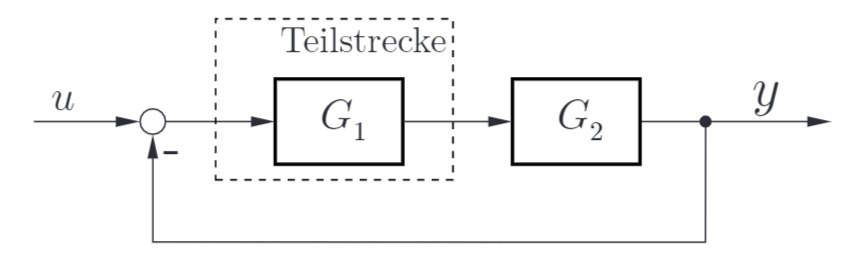
Das Regelsystem mit Führungsgröße kann durch folgenden Wirkungsplan beschrieben werden:
Hinweis: Alle Aufgabenteile sind unabhängig voneinander lösbar.
a) Begründen Sie, warum eine Positionsregelung mit einem einzelnen PIDRegler ohne unterlagerte Nickregelung den geschlossenen Regelkreis nicht stabilisieren kann.
Zunächst soll ein -Regler ausgelegt werden.
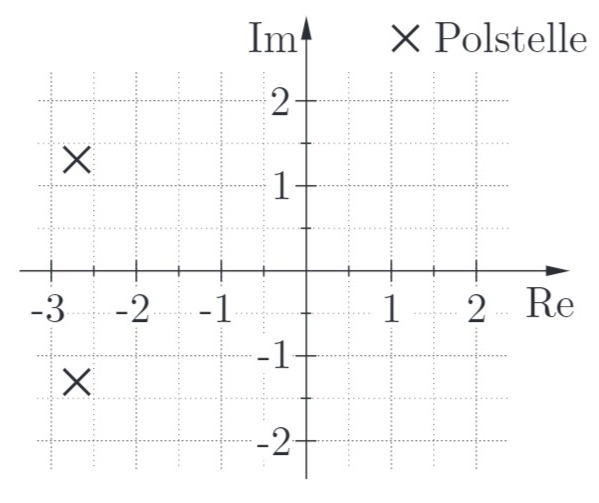
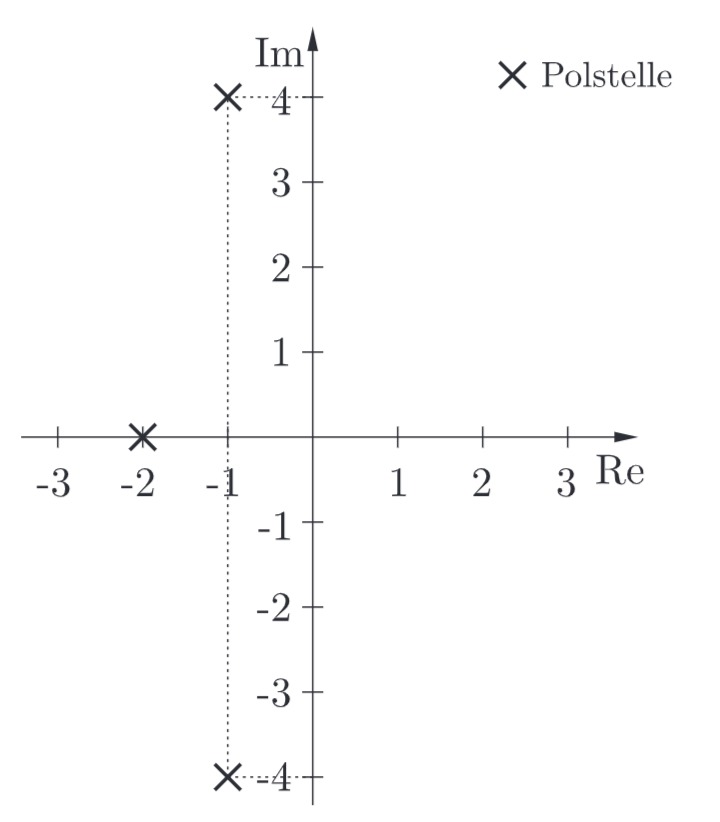
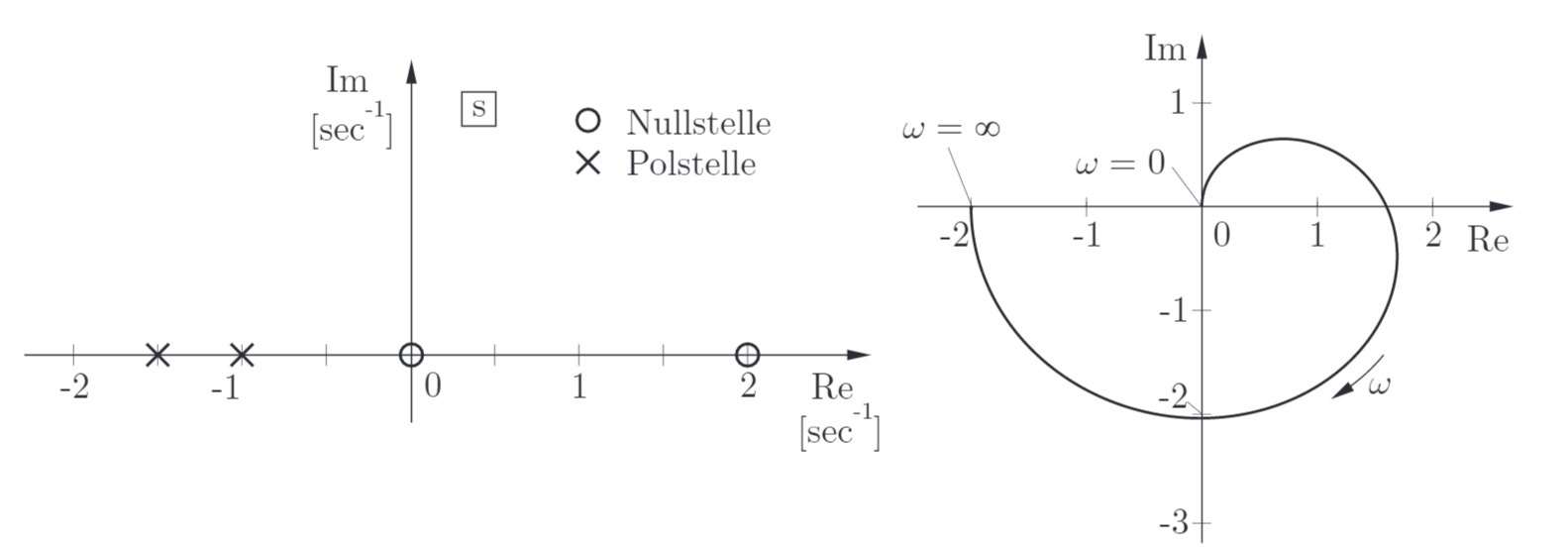
b) Bestimmen Sie die Reglerparameter und so, dass der geschlossene innere Regelkreis Polstellen entsprechend dem gegebenen Pol-Nullstellen Diagramm aufweist.
Für den äußeren Regelkreis wurde ein weiterer -Regler ausgelegt. Die Übertragungsfunktion des geschlossenen Regelkreises lautet:
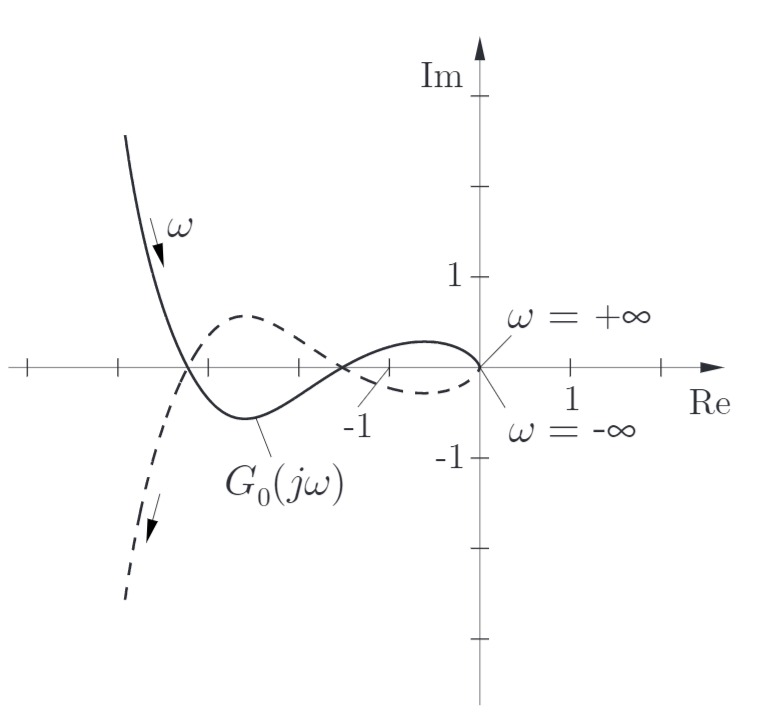
c) Bestimmen Sie die Routhschen Probefunktionen von . Ist stabil?
d) Der statische Endwert von für einen Einheitssprung beträgt Warum gibt es hier trotz fehlendem -Anteil im Regler keine bleibende Regelabweichung?

 Thema vorschlagen
Thema vorschlagen Theorie erstellen
Theorie erstellen Aufgabe erstellen
Aufgabe erstellen